APNewest Holybro Pixhawk 6X Flight Controller Standard / MINI Version Barometer / Gary 32 Bit Arm For Airplane Quadcopter
2 orders (reference)
Description
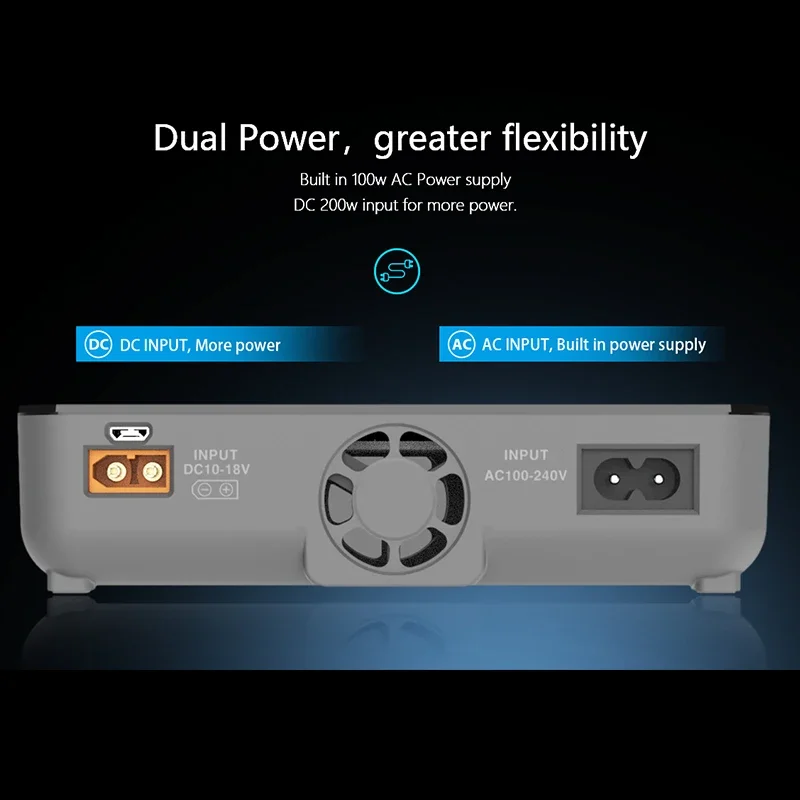
APNewest Holybro Pixhawk 6X Flight Controller Standard / MINI Version Barometer / Gary 32 Bit Arm For Airplane Quadcopter ============================================================ Newest version: Note: Currently shipping REV 8, it has 3x ICM-45686 IMU with BalancedGyro™ Technology Key Design Points Redundancy: 3x ICM-45686 IMU sensors (±32g) with BalancedGyro™ technology & 2x Barometer sensors High performance STM32H753 Processor with clock speed up to 480 MHz Modular flight controller: separated IMU, FMU, and Base system connected by a 100-pin & a 50-pin Pixhawk® Autopilot Bus connector. Triple redundancy domains: Completely isolated sensor domains with separate buses and separate power control All New advanced durable vibration isolation material with resonance frequency in the higher spectrum Ethernet interface for high-speed mission computer integration Temperature-controlled IMU board, allowing optimum working temperature of IMUs The Rev 8 Version is support in PX4 1.14.3 release and later. Ardupilot 4.5.0 stable release and later. Ardupilot firmware can be flash via Mission Planner or QGroundControl. Power module comparison chart Specification Processors & Sensors FMU Processor: STM32H753 32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM IO Processor: STM32F103 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM On-board sensors (Shipping Currently, Rev8) Accel/Gyro: 3x ICM-45686 (with BalancedGyro™ Technology) Barometer: ICP20100 & BMP388 Mag: BMM150 On-board sensors (Previous Revision, Rev 3/4) Accel/Gyro: BMI088/ICM-20649 Accel/Gyro: ICM-42688-P Accel/Gyro: ICM-42670-P Mag: BMM150 Barometer: 2x BMP388 Electrical data Voltage Ratings: Max input voltage: 6V USB Power Input: 4.75~5.25V Servo Rail Input: 0~36V Current Ratings: Telem1 output current limiter: 1.5A All other port combined output current limiter: 1.5A Mechanical data Dimensions Flight Controller Module: 38.8 x 31.8 x 16.8mm Standard Baseboard: 52.4 x 102 x 16.7mm (Aluminum) Mini Baseboard: 43.4 x 72.8 x 14.2 mm Weight Flight Controller Module: 31.3g Standard Baseboard: 72.5g (Aluminum) Mini Baseboard: 26.5g Reference Links Full Specification Pixhawk Baseboards Ports Power Module Setup Guide Dimensions Downloads Sample Wiring Diagram Latest info on Supported Firmware. For other technical Information, please visit https://docs.holybro.com/. SKU 11073 includes: Pixhawk 6X Flight Controller Module SKU 20292/SKU 20293 includes: Pixhawk 6X Flight Controller Module Pixhawk Standard Base / Pixhawk Mini Base PM02D HV Power Module Cable Set SKU 20294/20295/20296/20297 Pixhawk 6X Flight Controller Module Pixhawk Standard Base / Pixhawk Mini Base PM02D HV Power Module Cable Set M9N/M10 GPS Overview The Pixhawk® 6X is the latest update to the successful family of Pixhawk® flight controllers, based on the Pixhawk® FMUv6X Open Standard and the Pixhawk® Autopilot Bus Standard. It comes with PX4 Autopilot® pre-installed. Inside the Pixhawk® 6X, you can find an STMicroelectronics® based STM32H753, paired with sensor technology from Bosch®, InvenSense®, giving you flexibility and reliability for controlling any autonomous vehicle, suitable for both academic and commercial applications. The Pixhawk® 6X’s H7 microcontroller contain the Arm® Cortex®-M7 core running up to 480 MHz, has 2MB flash memory and 1MB RAM. Thanks to the updated processing power, developers can be more productive and efficient with their development work, allowing for complex algorithms and models. The FMUv6X open standard includes high-performance, low-noise IMUs on board, designed for better stabilization. Triple redundant IMU & double redundant barometer on separate buses. When the PX4 Autopilot detects a sensor failure, the system seamlessly switches to another to maintain flight control reliability. An independent LDO powers every sensor set with independent power control. A vibration isolation System to filter out high-frequency vibration and reduce noise to ensure accurate readings,
Specifications
| Attribute | Value |
|---|---|
| High-concerned chemical | None |
| Is Electric | No Battery |
| Quantity | 1 pcs |
| Is it battery/power supply | N |
| Is it charger/adapter | N |
| Is Batteries Included | No |
| Model Number | 6X |
| For Vehicle Type | Airplanes |
| Material | Composite Material |
| Origin | Mainland China |
| Recommend Age | 14+y |
| Use | Vehicles & Remote Control Toys |
Product Details
Newest version:
Note: Currently shipping REV 8, it has 3x ICM-45686 IMU with BalancedGyro™ Technology
Key Design Points
Redundancy: 3x ICM-45686 IMU sensors (±32g) with BalancedGyro™ technology & 2x Barometer sensors
High performance STM32H753 Processor with clock speed up to 480 MHz
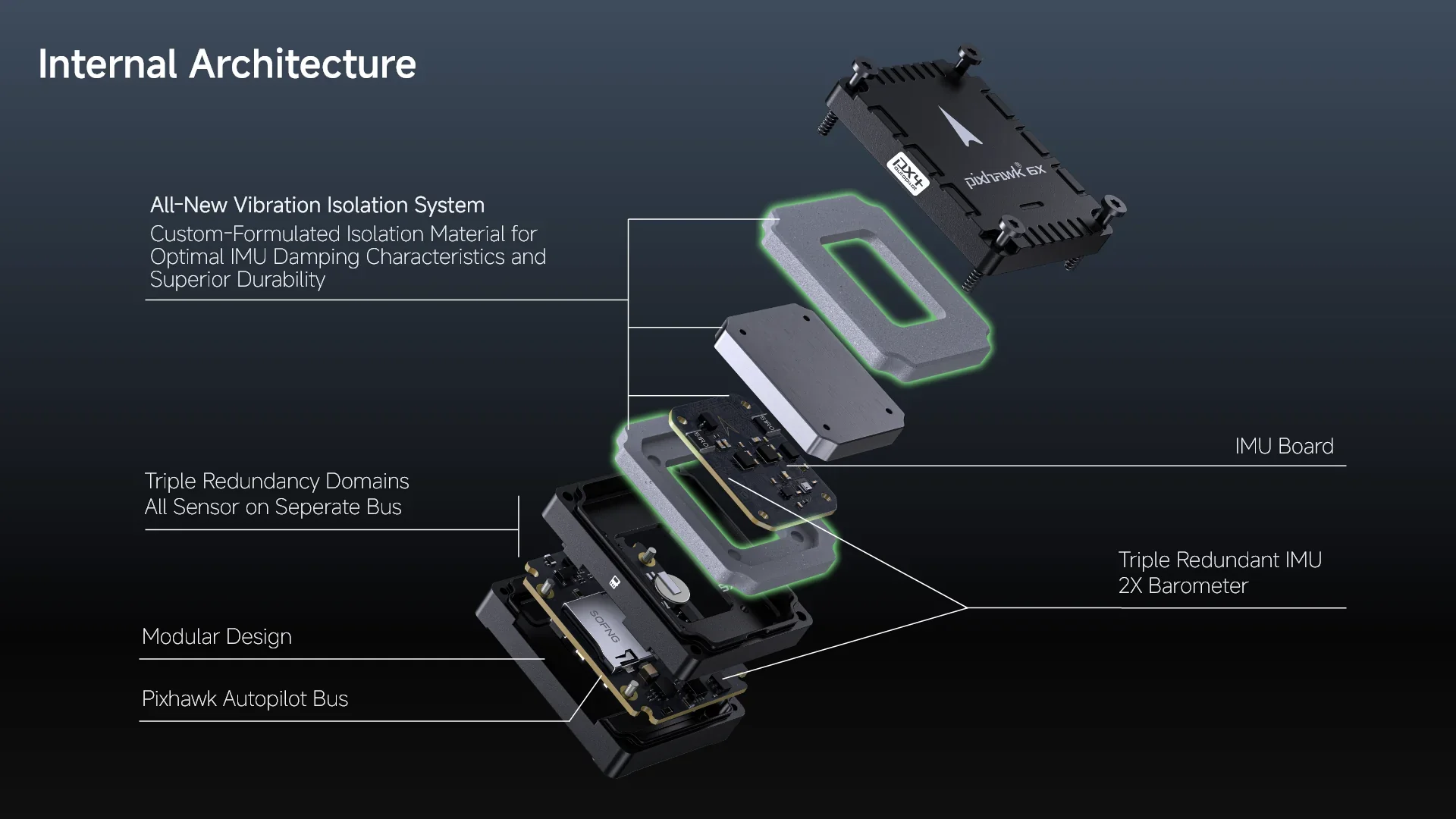
Modular flight controller: separated IMU, FMU, and Base system connected by a 100-pin & a 50-pin Pixhawk® Autopilot Bus connector.
Triple redundancy domains: Completely isolated sensor domains with separate buses and separate power control
All New advanced durable vibration isolation material with resonance frequency in the higher spectrum
Ethernet interface for high-speed mission computer integration
Temperature-controlled IMU board, allowing optimum working temperature of IMUs




Note:
The Rev 8 Version is support in PX4 1.14.3 release and later. Ardupilot 4.5.0 stable release and later. Ardupilot firmware can be flash via Mission Planner or QGroundControl.
Power module comparison chart
Specification
Processors & Sensors
FMU Processor: STM32H753
32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM
IO Processor: STM32F103
32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
On-board sensors (Shipping Currently, Rev8)
Accel/Gyro: 3x ICM-45686 (with BalancedGyro™ Technology)
Barometer: ICP20100 & BMP388
Mag: BMM150
On-board sensors (Previous Revision, Rev 3/4)
Accel/Gyro: BMI088/ICM-20649
Accel/Gyro: ICM-42688-P
Accel/Gyro: ICM-42670-P
Mag: BMM150
Barometer: 2x BMP388
Electrical data
Voltage Ratings:
Max input voltage: 6V
USB Power Input: 4.75~5.25V
Servo Rail Input: 0~36V
Current Ratings:
Telem1 output current limiter: 1.5A
All other port combined output current limiter: 1.5A
Mechanical data
Dimensions
Flight Controller Module: 38.8 x 31.8 x 16.8mm
Standard Baseboard: 52.4 x 102 x 16.7mm (Aluminum)
Mini Baseboard: 43.4 x 72.8 x 14.2 mm
Weight
Flight Controller Module: 31.3g
Standard Baseboard: 72.5g (Aluminum)
Mini Baseboard: 26.5g
Reference Links
Full Specification
Pixhawk Baseboards Ports
Power Module Setup Guide
Dimensions
Downloads
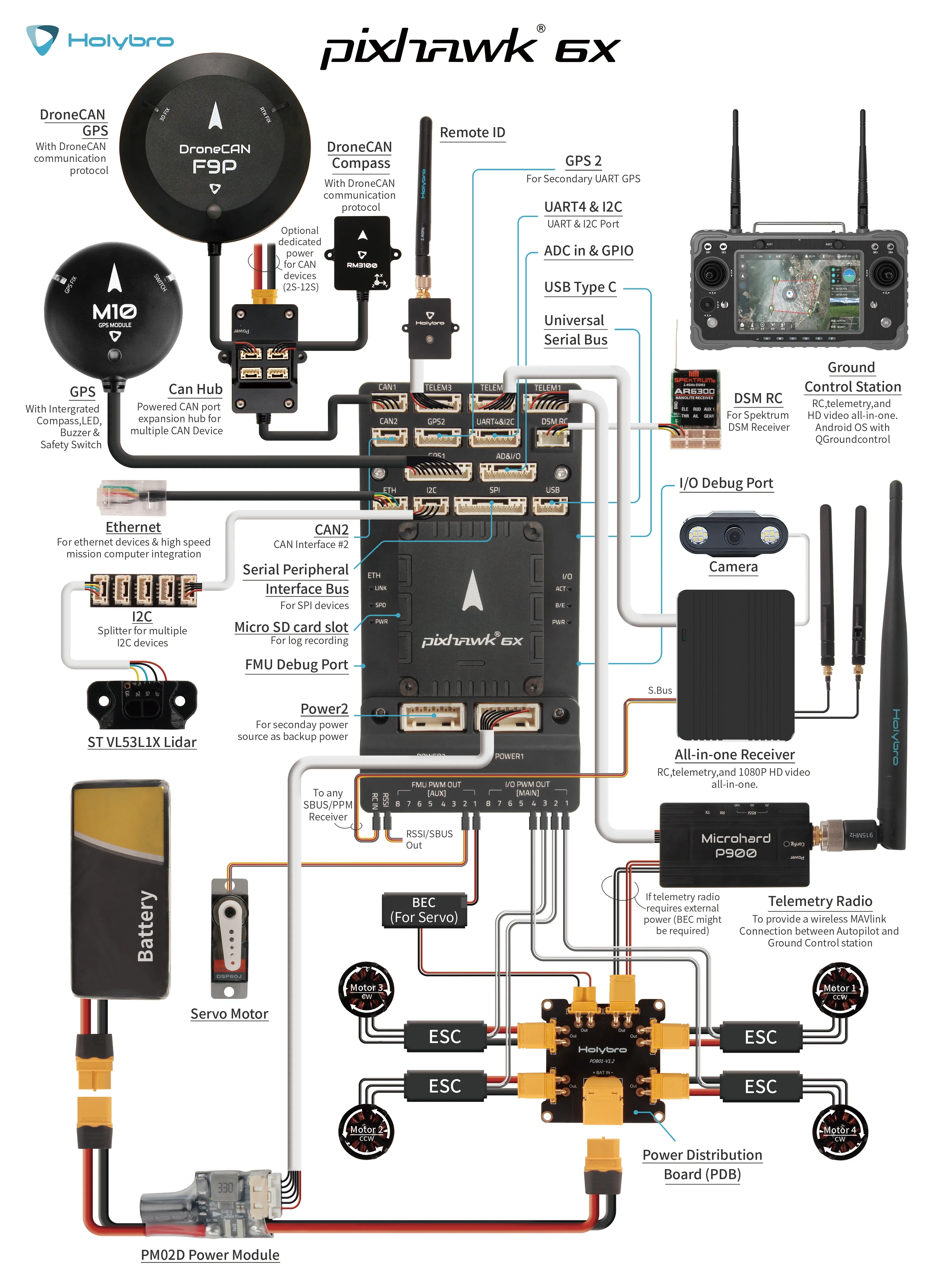
Sample Wiring Diagram
Latest info on Supported Firmware.
For other technical Information, please visit https://docs.holybro.com/.
SKU 11073 includes:
Pixhawk 6X Flight Controller Module
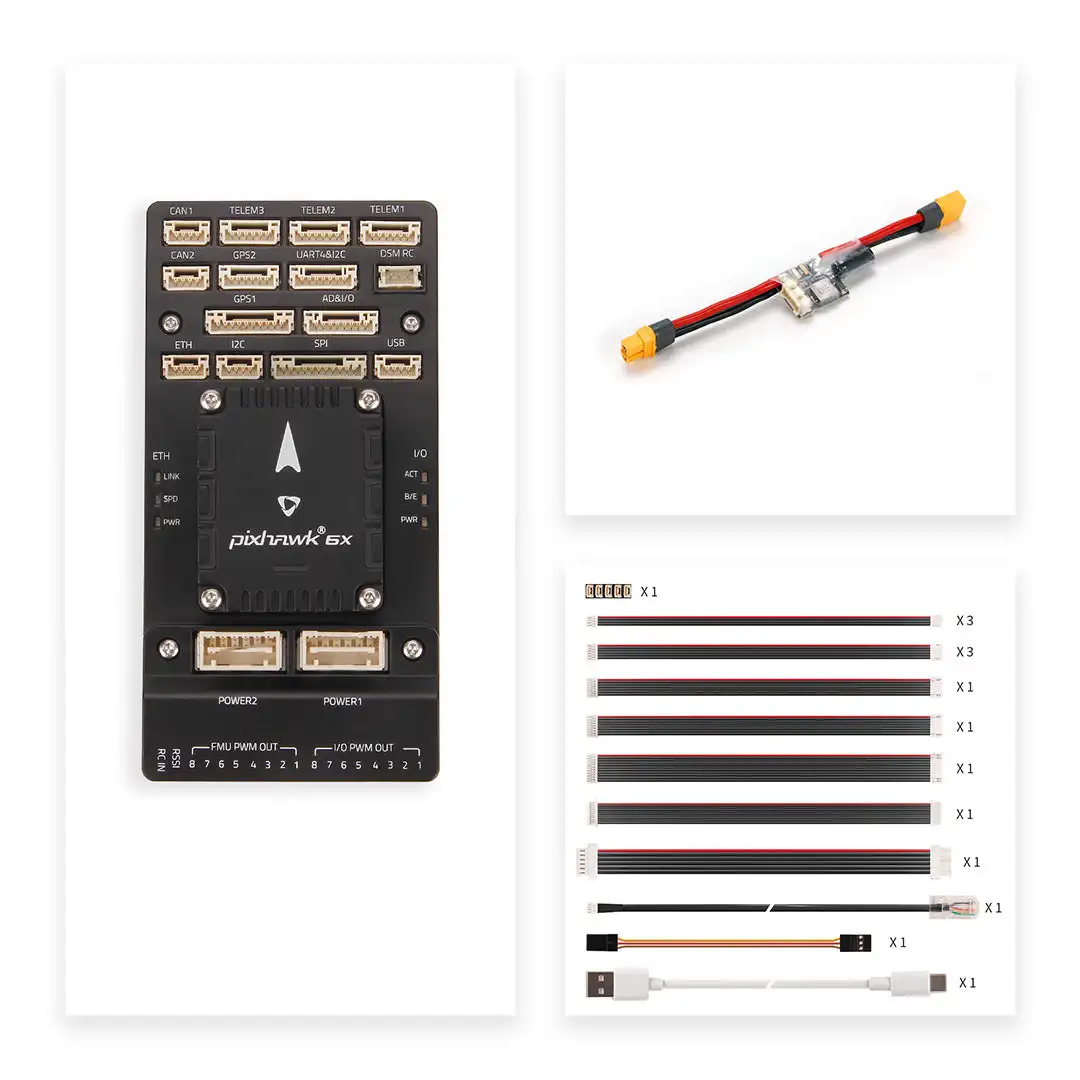
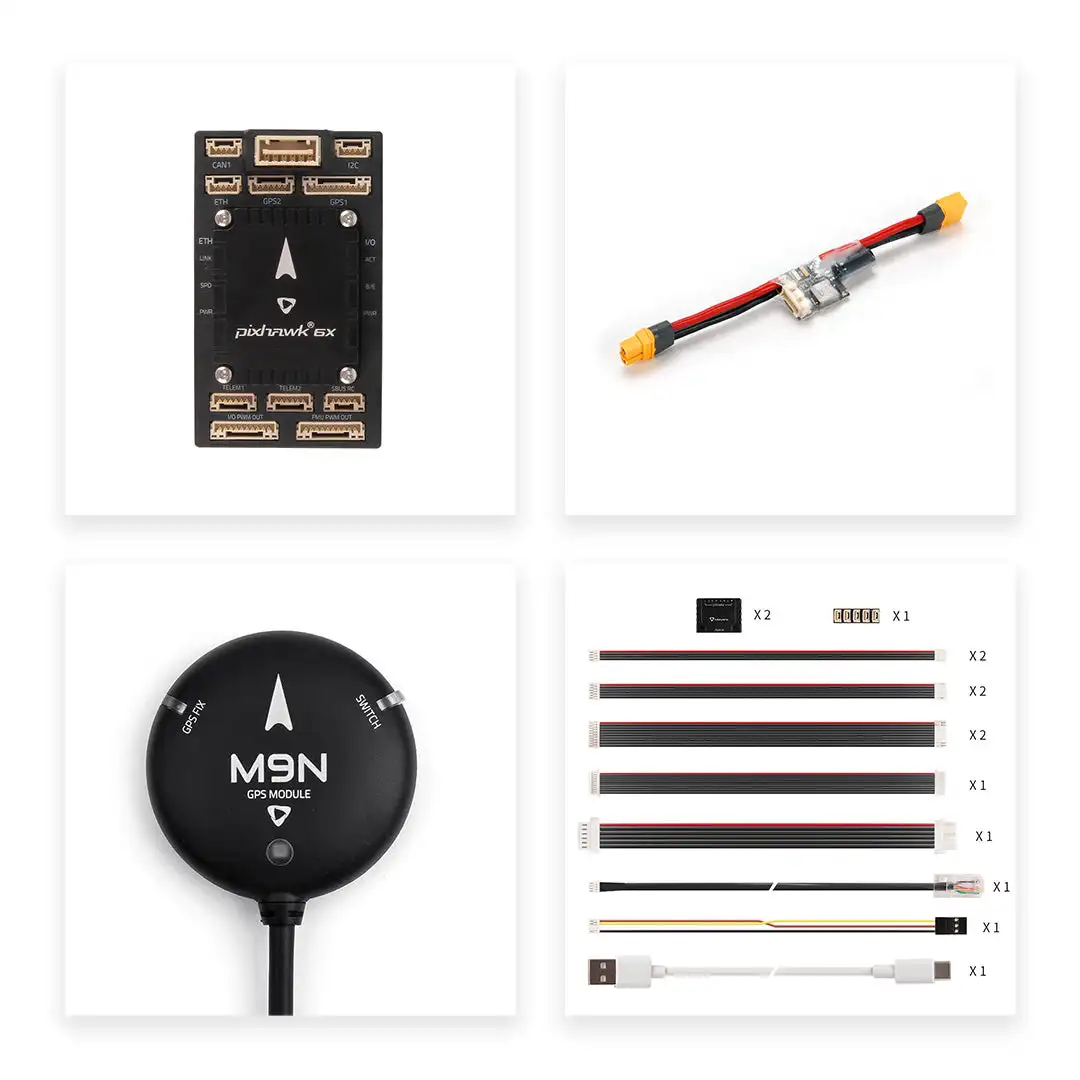
SKU 20292/SKU 20293 includes:
Pixhawk 6X Flight Controller Module
Pixhawk Standard Base / Pixhawk Mini Base
PM02D HV Power Module
Cable Set
SKU 20294/20295/20296/20297
Pixhawk 6X Flight Controller Module
Pixhawk Standard Base / Pixhawk Mini Base
PM02D HV Power Module
Cable Set
M9N/M10 GPS
Overview
The Pixhawk® 6X is the latest update to the successful family of Pixhawk® flight controllers, based on the Pixhawk® FMUv6X Open Standard and the Pixhawk® Autopilot Bus Standard. It comes with PX4 Autopilot® pre-installed. Inside the Pixhawk® 6X, you can find an STMicroelectronics® based STM32H753, paired with sensor technology from Bosch®, InvenSense®, giving you flexibility and reliability for controlling any autonomous vehicle, suitable for both academic and commercial applications.
The Pixhawk® 6X’s H7 microcontroller contain the Arm® Cortex®-M7 core running up to 480 MHz, has 2MB flash memory and 1MB RAM. Thanks to the updated processing power, developers can be more productive and efficient with their development work, allowing for complex algorithms and models.
The FMUv6X open standard includes high-performance, low-noise IMUs on board, designed for better stabilization. Triple redundant IMU & double redundant barometer on separate buses. When the PX4 Autopilot detects a sensor failure, the system seamlessly switches to another to maintain flight control reliability. An independent LDO powers every sensor set with independent power control. A vibration isolation System to filter out high-frequency vibration and reduce noise to ensure accurate readings, allowing vehicles to reach better overall flight performances. External sensor bus (SPI5) has two chip select lines and data-ready signals for additional sensors and payload with SPI-interface, and with an integrated Microchip Ethernet PHY, high-speed communication with mission computers via ethernet is now possible.
The Pixhawk® 6X is perfect for developers at corporate research labs, startups, academics (research, professors, students), and commercial application. Holybro offers the Pixhawk Baseboard and the Pixhawk Mini-Baseboard, each with different form factor and interfaces.
Key Design Points
High performance STM32H753 Processor with clock speed up to 480 MHz
Modular flight controller: separated IMU, FMU, and Base system connected by a 100-pin & a 50-pin Pixhawk® Autopilot Bus connector.
Redundancy: 3x IMU sensors & 2x Barometer sensors on separate buses
Triple redundancy domains: Completely isolated sensor domains with separate buses and separate power control
Newly designed vibration isolation system to filter out high frequency vibration and reduce noise to ensure accurate readings
Ethernet interface for high-speed mission computer integration
IMUs are temperature-controlled by onboard heating resistors, allowing optimum working temperature of IMUs
Note:
M10 GPS Requires PX4 1.14 & ArduPilot 4.3 or newer.
FC Module + a baseboard is require for this product to function. A FC Module or a Baseboard by itself will not function.
Starting from Nov 21, 2023, pixhawk 6x combo set will come with PM02D-HV instead of PM02D-LV
Power module comparison chart
Specification
Processors & Sensors
FMU Processor: STM32H753
32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM
IO Processor: STM32F103
32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
On-board sensors
Accel/Gyro: ICM-45686 with BalancedGyro™ Technology x3
Barometer: ICP20100
Barometer: BMP388
Mag: BMM150
Electrical data
Voltage Ratings:
Max input voltage: 6V
USB Power Input: 4.75~5.25V
Servo Rail Input: 0~36V
Current Ratings:
Telem1 output current limiter: 1.5A
All other port combined output current limiter: 1.5A
Mechanical data
Dimensions
Flight Controller Module: 38.8 x 31.8 x 16.8mm
Standard Baseboard: 52.4 x 102 x 16.7mm (Aluminum)
Mini Baseboard: 43.4 x 72.8 x 14.2 mm
Weight
Flight Controller Module: 31.3g
Standard Baseboard: 72.5g (Aluminum)
Mini Baseboard: 26.5g
SKU 11073 includes:
Pixhawk 6X Flight Controller Module
SKU 20292/SKU 20293 includes:
Pixhawk 6X Flight Controller Module
Pixhawk Standard Base / Pixhawk Mini Base
PM02D HV Power Module(Previously shipped with PM02D-LV)
Cable Set
SKU 20294/20295/20296/20297
Pixhawk 6X Flight Controller Module
Pixhawk Standard Base / Pixhawk Mini Base
PM02D HV Power Module (Previously shipped with PM02D-LV)
Cable Set
M9N/M10 GPS
For other technical Information, please visit https://docs.holybro.com/.
Full Specification
Pixhawk Baseboards Ports
Power Module Setup Guide
Dimensions
Downloads
Sample Fixed Wing VTOL Wiring Diagram
Latest info on Supported Firmware.
If you need manual, please contact seller
11073:

20292:
20293:

20294:

20295:

20296:

20297:
Note:
M10 GPS Requires PX4 1.14 & ArduPilot 4.3 or newer.
FC Module + a baseboard is require for this product to function. A FC Module or a Baseboard by itself will not function.
PM02 High Voltage (2S-12S) Power Module can be purchased here
Power module comparison chart
SKU 20172/SKU 20173 includes:
Pixhawk 6X Flight Controller Module
Pixhawk Standard Base / Pixhawk Mini Base
PM02D LV Power Module
Cable Set
SKU 20243/20242/20245/20244
Pixhawk 6X Flight Controller Module
Pixhawk Standard Base / Pixhawk Mini Base
PM02D LV Power Module
Cable Set
M9N/M10 GPS
Inside the Pixhawk® 6X, you can find an STMicroelectronics® based STM32H753, paired with sensor technology from Bosch®, InvenSense®, giving you flexibility and reliability for controlling any autonomous vehicle, suitable for both academic and commercial applications.
The Pixhawk® 6X’s H7 microcontroller contain the Arm® Cortex®-M7 core running up to 480 MHz, has 2MB flash memory and 1MB RAM. The PX4 Autopilot takes advantage of the increased power and RAM. Thanks to the updated processing power, developers can be more productive and efficient with their development work, allowing for complex algorithms and models.
The FMUv6X open standard includes high-performance, low-noise IMUs on board, designed for better stabilization. Triple redundant IMU & double redundant barometer on separate buses. When the PX4 Autopilot detects a sensor failure, the system seamlessly switches to another to maintain flight control reliability.
An independent LDO powers every sensor set with independent power control. A vibration isolation System to filter out high-frequency vibration and reduce noise to ensure accurate readings, allowing vehicles to reach better overall flight performances.
External sensor bus (SPI5) has two chip select lines and data-ready signals for additional sensors and payload with SPI-interface, and with an integrated Microchip Ethernet PHY, high-speed communication with mission computers via ethernet is now possible.
The Pixhawk® 6X is perfect for developers at corporate research labs, startups, academics (research, professors, students), and commercial application.
Key Design Points
High performance STM32H753 Processor
Modular flight controller: separated IMU, FMU, and Base system connected by a 100-pin & a 50-pin Pixhawk® Autopilot Bus connector.
Redundancy: 3x IMU sensors & 2x Barometer sensors on separate buses
Triple redundancy domains: Completely isolated sensor domains with separate buses and separate power control
Newly designed vibration isolation system to filter out high frequency vibration and reduce noise to ensure accurate readings
Ethernet interface for high-speed mission computer integration
IMUs are temperature-controlled by onboard heating resistors, allowing optimum working temperature of IMUs
FMU Processor: STM32H753
32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM
IO Processor: STM32F100
32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
On-board sensors
Accel/Gyro: ICM-20649
Accel/Gyro: ICM-42688-P
Accel/Gyro: ICM-42670-P
Mag: BMM150
Barometer: 2x BMP388
Electrical data
Voltage Ratings:
Max input voltage: 6V
USB Power Input: 4.75~5.25V
Servo Rail Input: 0~36V
Current Ratings:
Telem1 output current limiter: 1.5A
All other port combined output current limiter: 1.5A
Mechanical data
Dimensions
Flight Controller Module: 38.8 x 31.8 x 14.6mm
Standard Baseboard: 52.4 x 103.4 x 16.7mm
Mini Baseboard: 43.4 x 72.8 x 14.2 mm
Weight
Flight Controller Module: 23g
Standard Baseboard: 51g
Mini Baseboard: 26.5g
Interfaces
16- PWM servo outputs
R/C input for Spektrum / DSM
Dedicated R/C input for PPM and S.Bus input
Dedicated analog / PWM RSSI input and S.Bus output
4 general purpose serial ports
3 with full flow control
1 with separate 1.5A current limit (Telem1)
1 with I2C and additional GPIO line for external NFC reader
2 GPS ports
1 full GPS plus Safety Switch Port
1 basic GPS port
1 I2C port
1 Ethernet port
Transformerless Applications
100Mbps
1 SPI bus
2 chip select lines
2 data-ready lines
1 SPI SYNC line
1 SPI reset line
2 CAN Buses for CAN peripheral
CAN Bus has individual silent controls or ESC RX-MUX control
2 Power input ports with SMBus
1 AD & IO port
2 additional analog input
1 PWM/Capture input
2 Dedicated debug and GPIO lines
M10 GPS

Overview
The M10 GPS uses multi-constellation GNSS powered by u-bl0x M10 series, a concurrent GNSS receiver which can receive and track multiple GNSS systems. Owing to the multi-band RF front-end architecture all four major GNSS constellations, GPS,Galileo, GLONASS and BeiDou can be received concurrently.
It also comes with the IST8310 compass, tricolored LED indicator, buzzer, and a safety switch. There are 3 different connectors options for different purposes. This module ships with a baud rate of 115200 5Hz.
The high-gain 25 x 25 mm patch antenna provides excellent performance and the omnidirectional antenna radiation pattern increases flexibility for device installation. It features active circuitry for the ceramic patch antenna, rechargeable backup battery for warm starts.
Firmware Support for M10 GPS:
PX4 1.14, ArduPilot 4.3, INAV 5.0.0, Betaflight 4.3.0 or newer is required.
Features
Newest Ubl0x 10th Gen GNSS
Fast & Accurate Positioning
High-gain 25*25*4mm antenna
IST8310 Compass
Internal Buzzer, Safety switch
Ultra Bright UI RGB LED
Specification
| Holybro M9N GPS | |
GNSS Receiver | Ubl0x M10 | Ubl0x M9N |
Number of Concurrent GNSS | Up to 4 GNSS | Up to 4 GNSS |
BeiDou | BeiDou | |
Galileo | Galileo | |
GLONASS | GLONASS | |
GPS | GPS | |
QZSS | QZSS | |
Frequency Band | GPS L1 | GPS L1 |
Galileo E1 | Galileo E1 | |
GLONASS L1 | GLONASS L1 | |
BeiDou B1 | BeiDou B1 | |
SBAS L1 | SBAS L1 | |
QZSS L1 | QZSS L1 | |
Compass | IST8310 | IST8310 |
Output Protocol | UBX (U-bl0x) | UBX (U-bl0x) |
NMEA | NMEA | |
Accuracy | 2.0m CEP | 1.5m CEP |
Nav. Update Rate | Up to 25 Hz (single GNSS), | Up to 25 Hz (4 concerrent GNSS) |
Up to 10 Hz (4 concurrent GNSS) | ||
GNSS Augmentation System | EGNOS, GAGAN, MSAS and WAAS | EGNOS, GAGAN, MSAS and WAAS |
QZSS: L1S | QZSS: L1S | |
Default Baud Rate | 115200 | 115200 |
Input Voltage | 4.7-5.2V | 4.7-5.2V |
Port Type | JST-GH-10P | JST-GH-10P |
Antenna | 25 x 25 x 4 mm ceramic patch antenna | 25 x 25 x 4 mm ceramic patch antenna |
Power consumption | Less than 200mA @ 5V | Less than 200mA @ 5V |
Operating Temperature | -40~80C | -40~80C |
Dimension | φ50 x14.4 mm | φ50 x14.4 mm |
Weight | 32g | 32g |
Cable Length | 26cm (42cm cable purchase separately) | 26cm (42cm cable purchase separately) |
Other | Tri-color LED | Tri-color LED |
Onboard Buzzer | Onboard Buzzer | |
Safety Switch | Safety Switch | |
LNA MAX2659ELT+ RF Amplifier | LNA MAX2659ELT+ RF Amplifier | |
Rechargeable Farah capacitance | Rechargeable Farah capacitance | |
Low noise 3.3V regulator | Low noise 3.3V regulator |
M9N GPS