Holybro Pixhawk 6X PRO Flight Control PX4 Development Board Multi-axis Fixed Wing Droptop Drone
Description
Holybro Pixhawk 6X PRO Flight Control PX4 Development Board Multi-axis Fixed Wing Droptop Drone ============================================================ Pixhawk6X飞控概述及配置参数 Overview The Pixhawk® 6X is the latest update to the successful family of Pixhawk® flight controllers, based on the Pixhawk® FMUv6X Open Standard and the Pixhawk® Autopilot Bus Standard. It comes with PX4 Autopilot® pre-installed. Inside the Pixhawk® 6X, you can find an STMicroelectronics® based STM32H753, paired with sensor technology from Bosch®, InvenSense®, giving you flexibility and reliability for controlling any autonomous vehicle, suitable for both academic and commercial applications. The Pixhawk® 6X’s H7 microcontroller contain the Arm® Cortex®-M7 core running up to 480 MHz, has 2MB flash memory and 1MB RAM. Thanks to the updated processing power, developers can be more productive and efficient with their development work, allowing for complex algorithms and models. The FMUv6X open standard includes high-performance, low-noise IMUs on board, designed for better stabilization. Triple redundant IMU & double redundant barometer on separate buses. When the PX4 Autopilot detects a sensor failure, the system seamlessly switches to another to maintain flight control reliability. An independent LDO powers every sensor set with independent power control. A vibration isolation System to filter out high-frequency vibration and reduce noise to ensure accurate readings, allowing vehicles to reach better overall flight performances. External sensor bus (SPI5) has two chip select lines and data-ready signals for additional sensors and payload with SPI-interface, and with an integrated Microchip Ethernet PHY, high-speed communication with mission computers via ethernet is now possible. The Pixhawk® 6X is perfect for developers at corporate research labs, startups, academics (research, professors, students), and commercial application. Holybro offers the Pixhawk Baseboard and the Pixhawk Mini-Baseboard, each with different form factor and interfaces. Key Design Points High performance STM32H753 Processor with clock speed up to 480 MHz Modular flight controller: separated IMU, FMU, and Base system connected by a 100-pin & a 50-pin Pixhawk® Autopilot Bus connector. Redundancy: 3x IMU sensors & 2x Barometer sensors on separate buses Triple redundancy domains: Completely isolated sensor domains with separate buses and separate power control Newly designed vibration isolation system to filter out high frequency vibration and reduce noise to ensure accurate readings Ethernet interface for high-speed mission computer integration IMUs are temperature-controlled by onboard heating resistors, allowing optimum working temperature of IMUs Specification Processors & Sensors FMU Processor: STM32H753 32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM IO Processor: STM32F103 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM On-board sensors Accel/Gyro: ICM-45686 with BalancedGyro™ Technology x3 Barometer: ICP20100 Barometer: BMP388 Mag: BMM150 Electrical data Voltage Ratings: Max input voltage: 6V USB Power Input: 4.75~5.25V Servo Rail Input: 0~36V Current Ratings: Telem1 output current limiter: 1.5A All other port combined output current limiter: 1.5A Mechanical data Dimensions Flight Controller Module: 38.8 x 31.8 x 16.8mm Standard Baseboard: 52.4 x 102 x 16.7mm ( Aluminum ) Mini Baseboard: 43.4 x 72.8 x 14.2 mm Weight Flight Controller Module: 31.3g Standard Baseboard: 72.5g ( Aluminum) Mini Baseboard: 26.5g Pixhawk6X PRO飞控概述及配置参数 Key Design Point High-performance ADIS16470 Industrial IMU with high accelerometer dynamic range (±40 g), perfect foraccurate motion sensing in demanding UAV applications All New advanced durable vibration isolation material with resonance frequency in the higher spectrum, ideal for industrial and commercial drone applications Triple redundant IMU & double redundant barometer on separate buses High performance STM32H753 Processor M
Product Details
Pixhawk6X飞控概述及配置参数
Overview
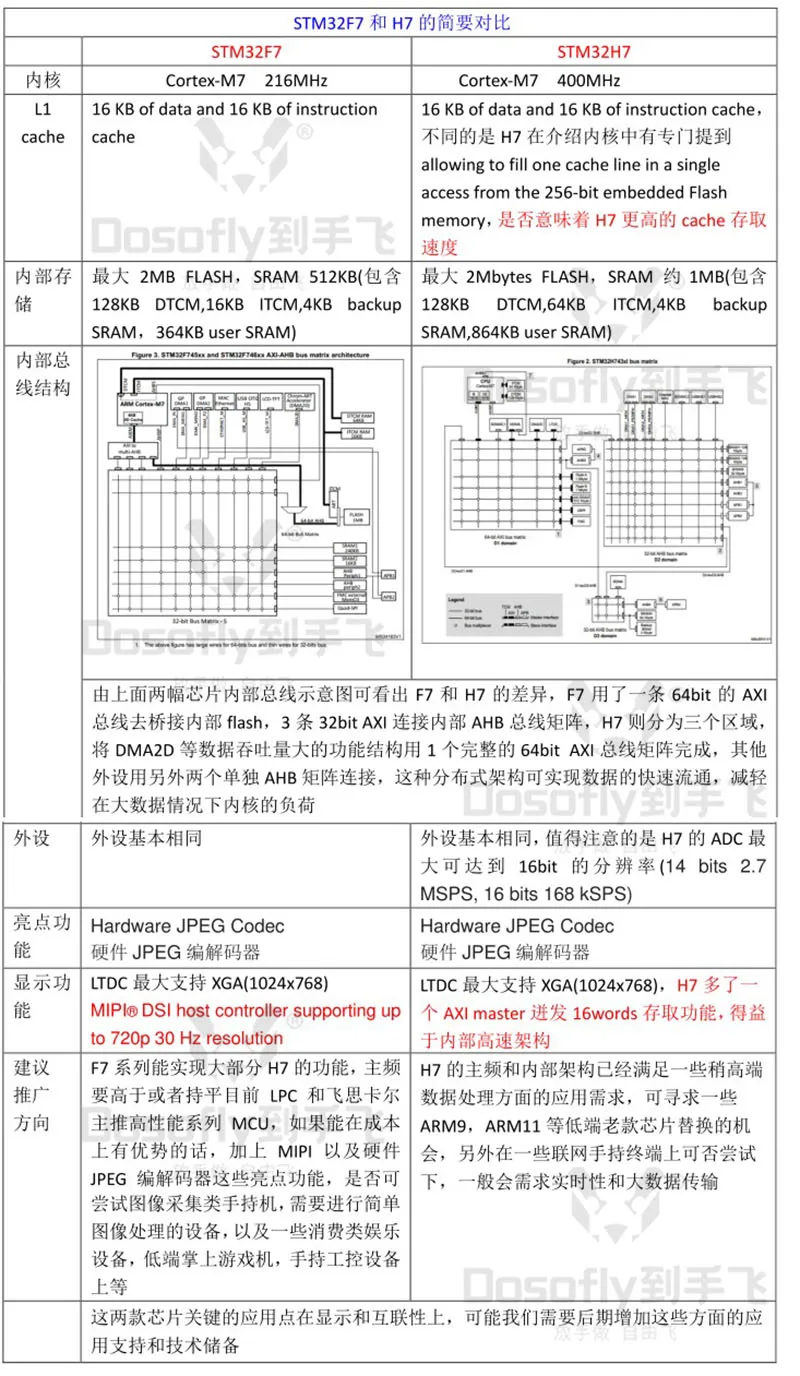
The Pixhawk® 6X is the latest update to the successful family of Pixhawk® flight controllers, based on the Pixhawk® FMUv6X Open Standard and the Pixhawk® Autopilot Bus Standard. It comes with PX4 Autopilot® pre-installed. Inside the Pixhawk® 6X, you can find an STMicroelectronics® based STM32H753, paired with sensor technology from Bosch®, InvenSense®, giving you flexibility and reliability for controlling any autonomous vehicle, suitable for both academic and commercial applications.
The Pixhawk® 6X’s H7 microcontroller contain the Arm® Cortex®-M7 core running up to 480 MHz, has 2MB flash memory and 1MB RAM. Thanks to the updated processing power, developers can be more productive and efficient with their development work, allowing for complex algorithms and models.
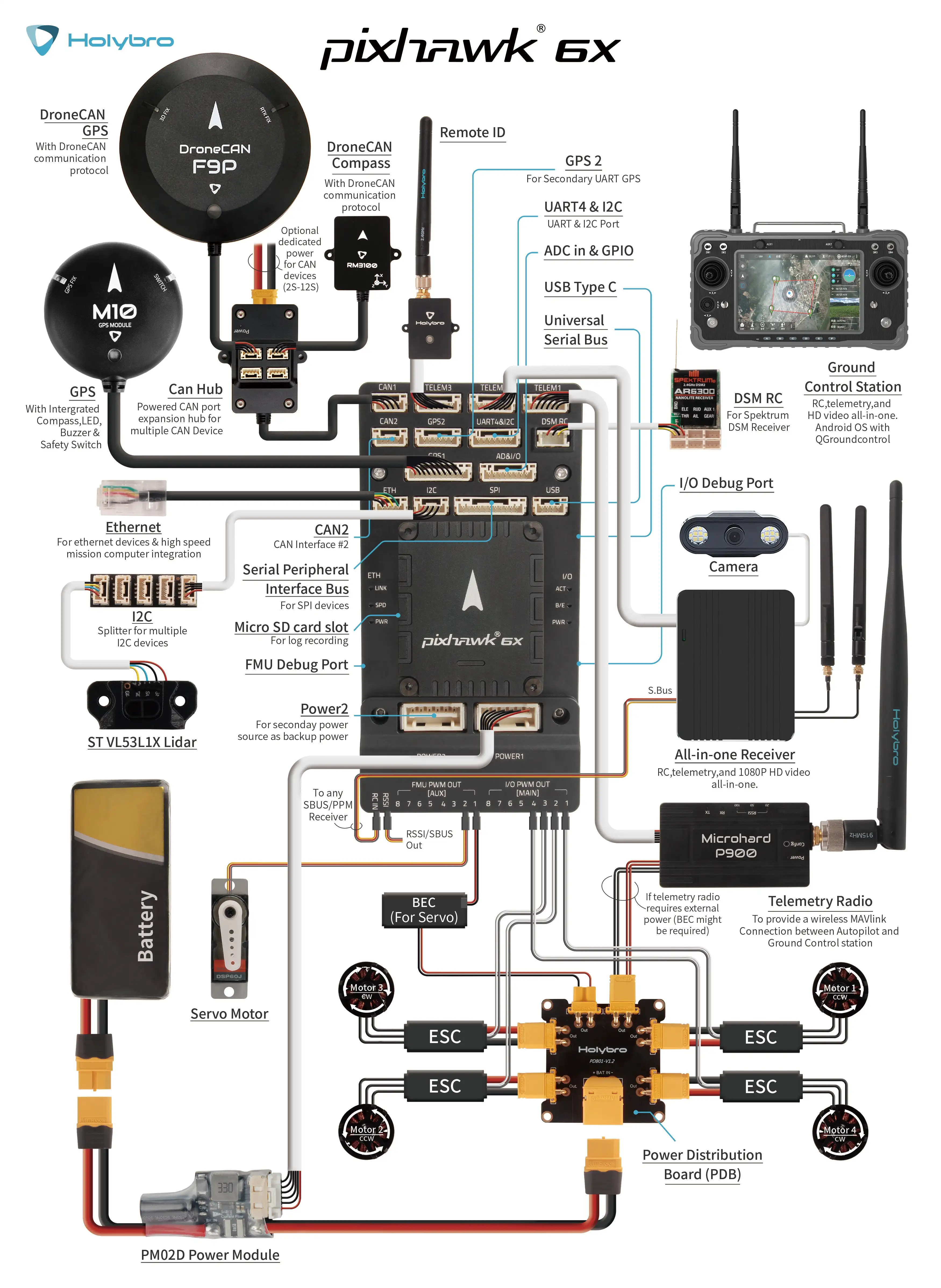
The FMUv6X open standard includes high-performance, low-noise IMUs on board, designed for better stabilization. Triple redundant IMU & double redundant barometer on separate buses. When the PX4 Autopilot detects a sensor failure, the system seamlessly switches to another to maintain flight control reliability. An independent LDO powers every sensor set with independent power control. A vibration isolation System to filter out high-frequency vibration and reduce noise to ensure accurate readings, allowing vehicles to reach better overall flight performances. External sensor bus (SPI5) has two chip select lines and data-ready signals for additional sensors and payload with SPI-interface, and with an integrated Microchip Ethernet PHY, high-speed communication with mission computers via ethernet is now possible.
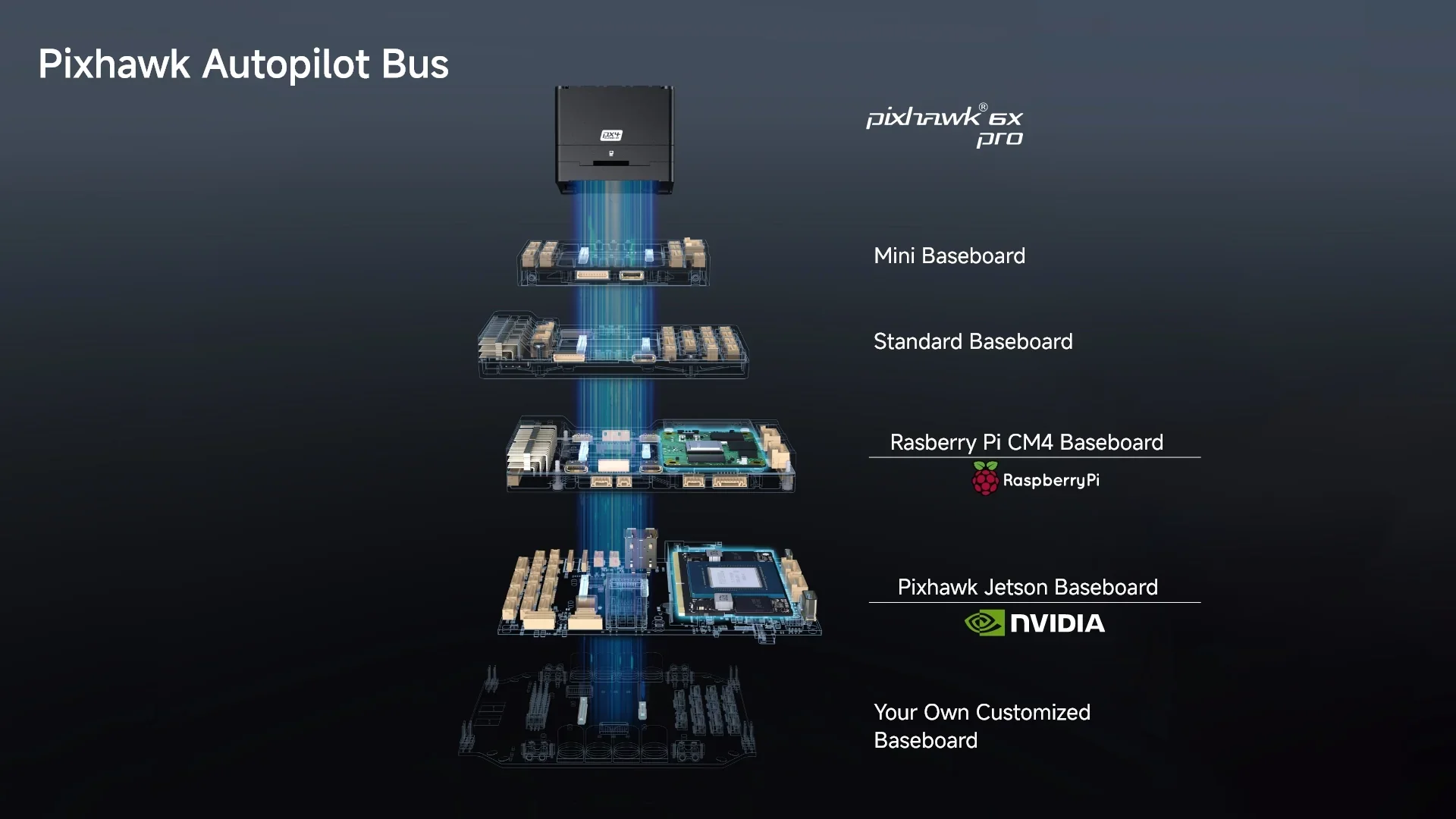
The Pixhawk® 6X is perfect for developers at corporate research labs, startups, academics (research, professors, students), and commercial application. Holybro offers the Pixhawk Baseboard and the Pixhawk Mini-Baseboard, each with different form factor and interfaces.
Key Design Points
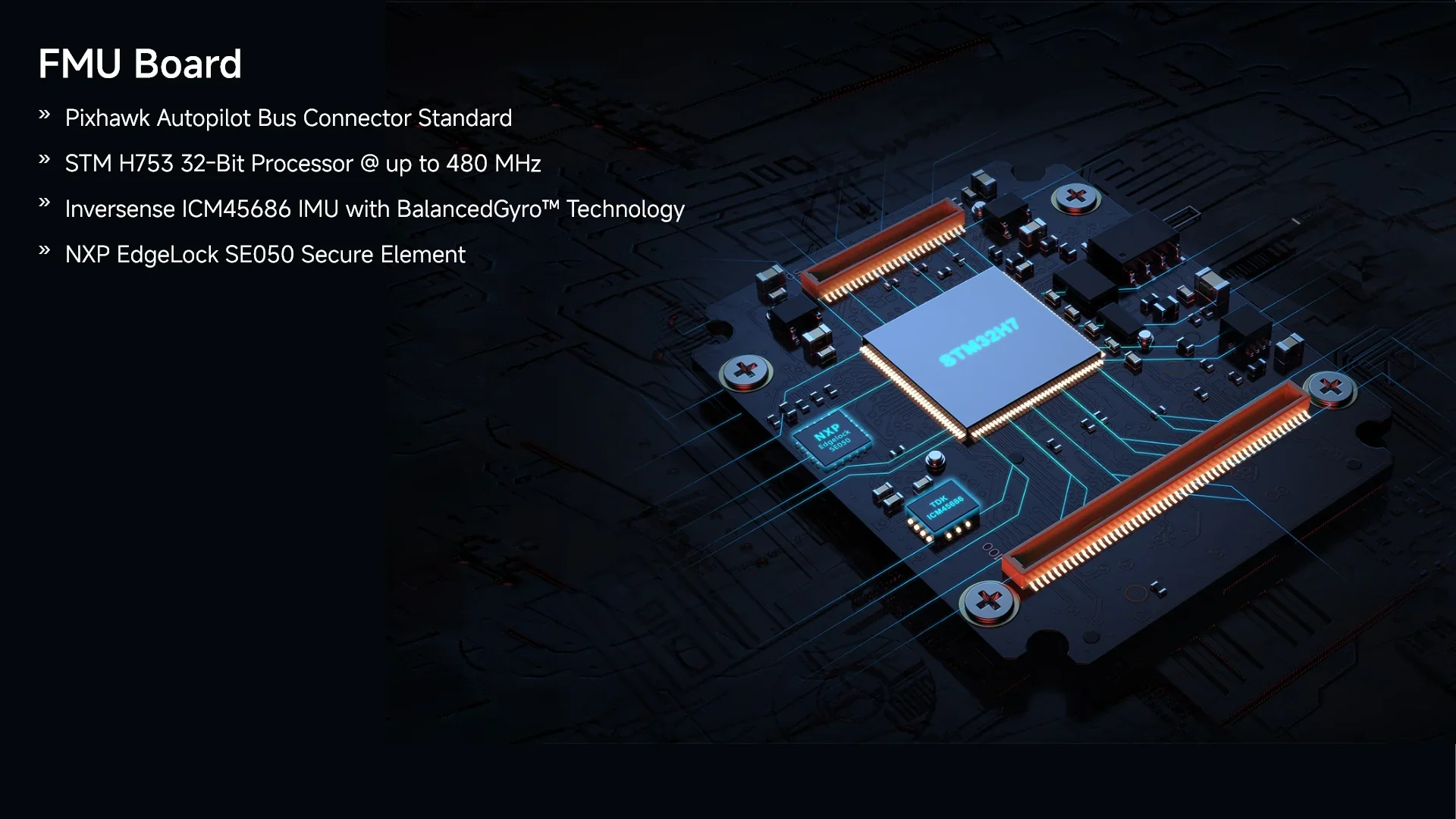
High performance STM32H753 Processor with clock speed up to 480 MHz
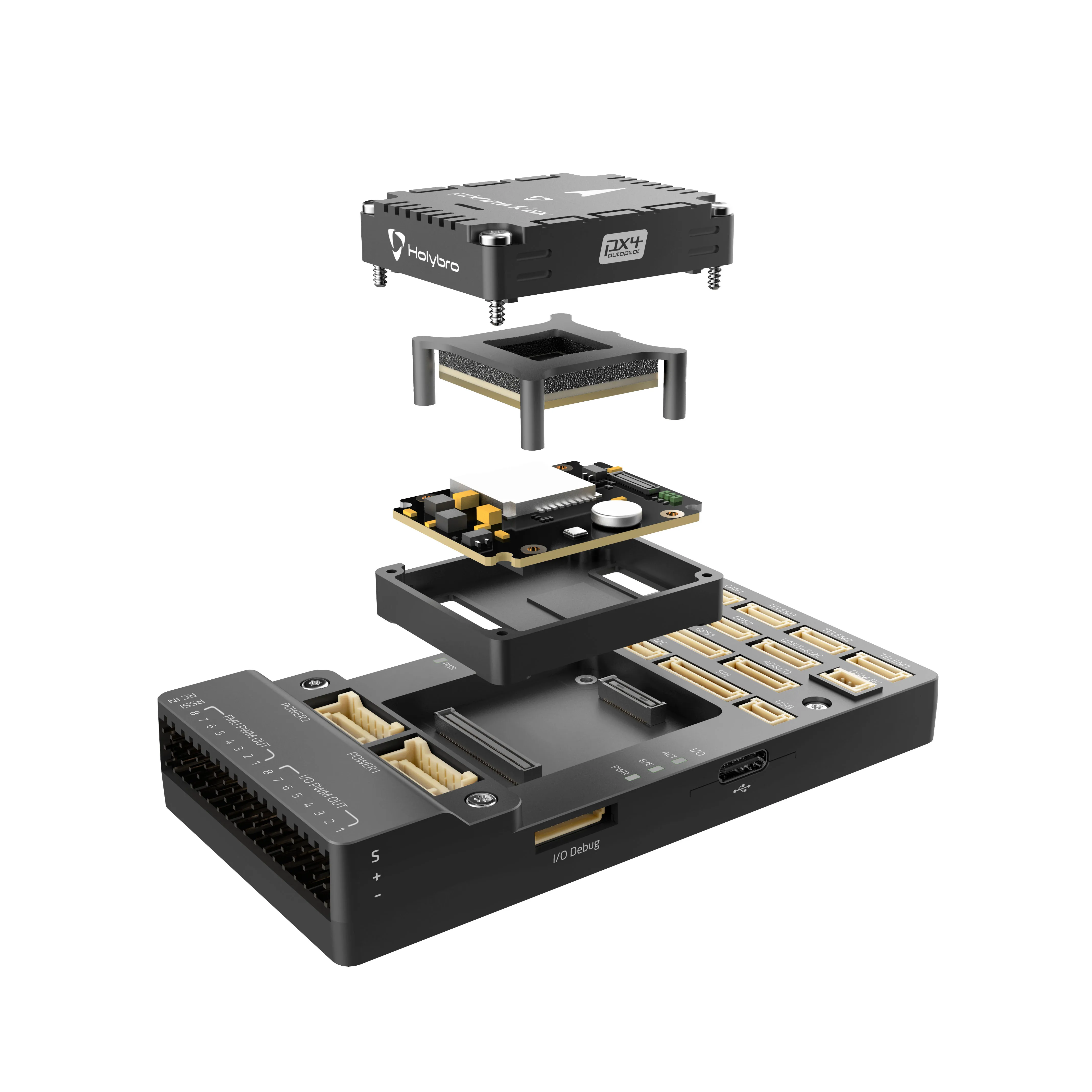
Modular flight controller: separated IMU, FMU, and Base system connected by a 100-pin & a 50-pin Pixhawk® Autopilot Bus connector.
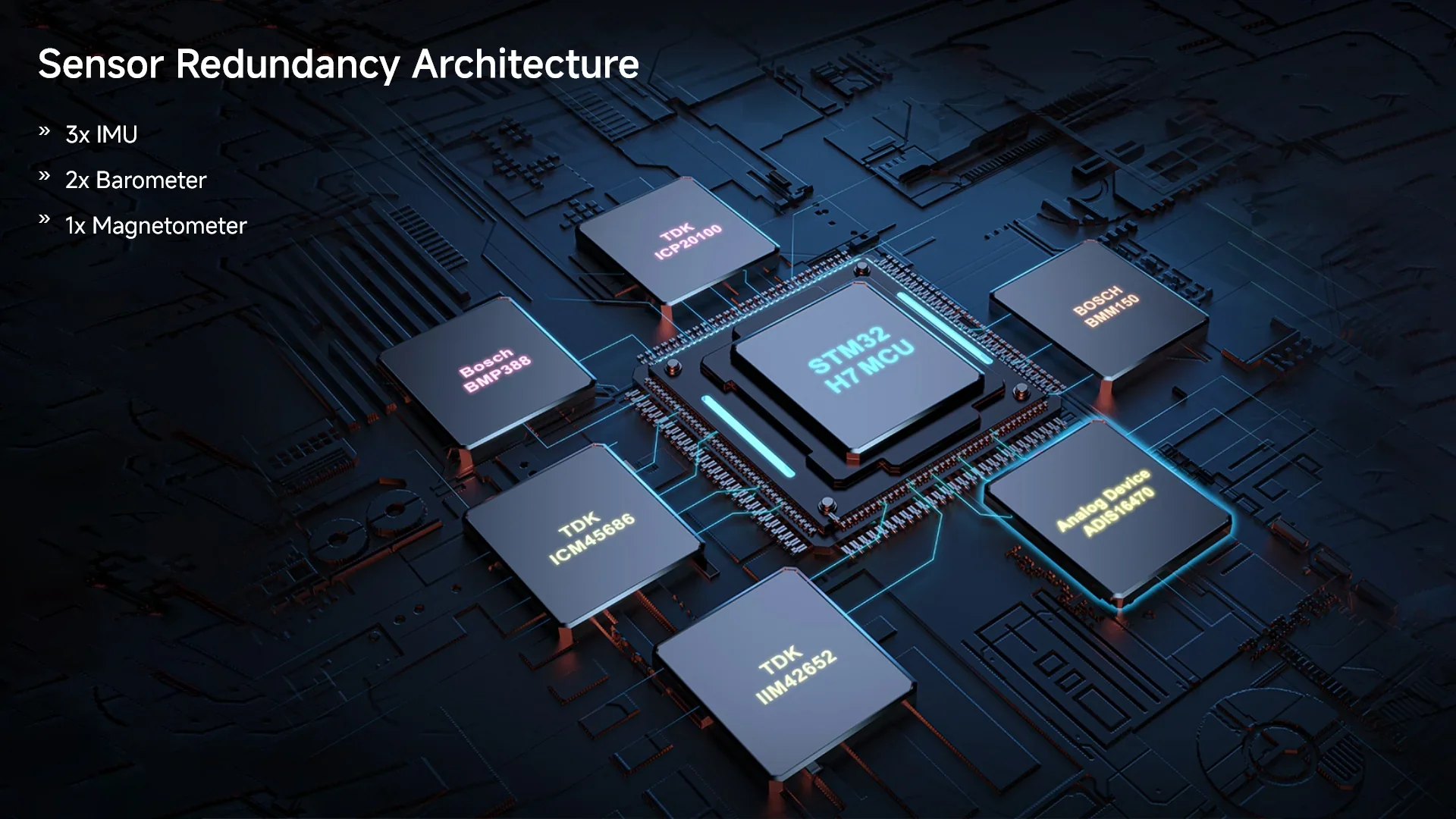
Redundancy: 3x IMU sensors & 2x Barometer sensors on separate buses
Triple redundancy domains: Completely isolated sensor domains with separate buses and separate power control
Newly designed vibration isolation system to filter out high frequency vibration and reduce noise to ensure accurate readings
Ethernet interface for high-speed mission computer integration
IMUs are temperature-controlled by onboard heating resistors, allowing optimum working temperature of IMUs
Specification
Processors & Sensors
-
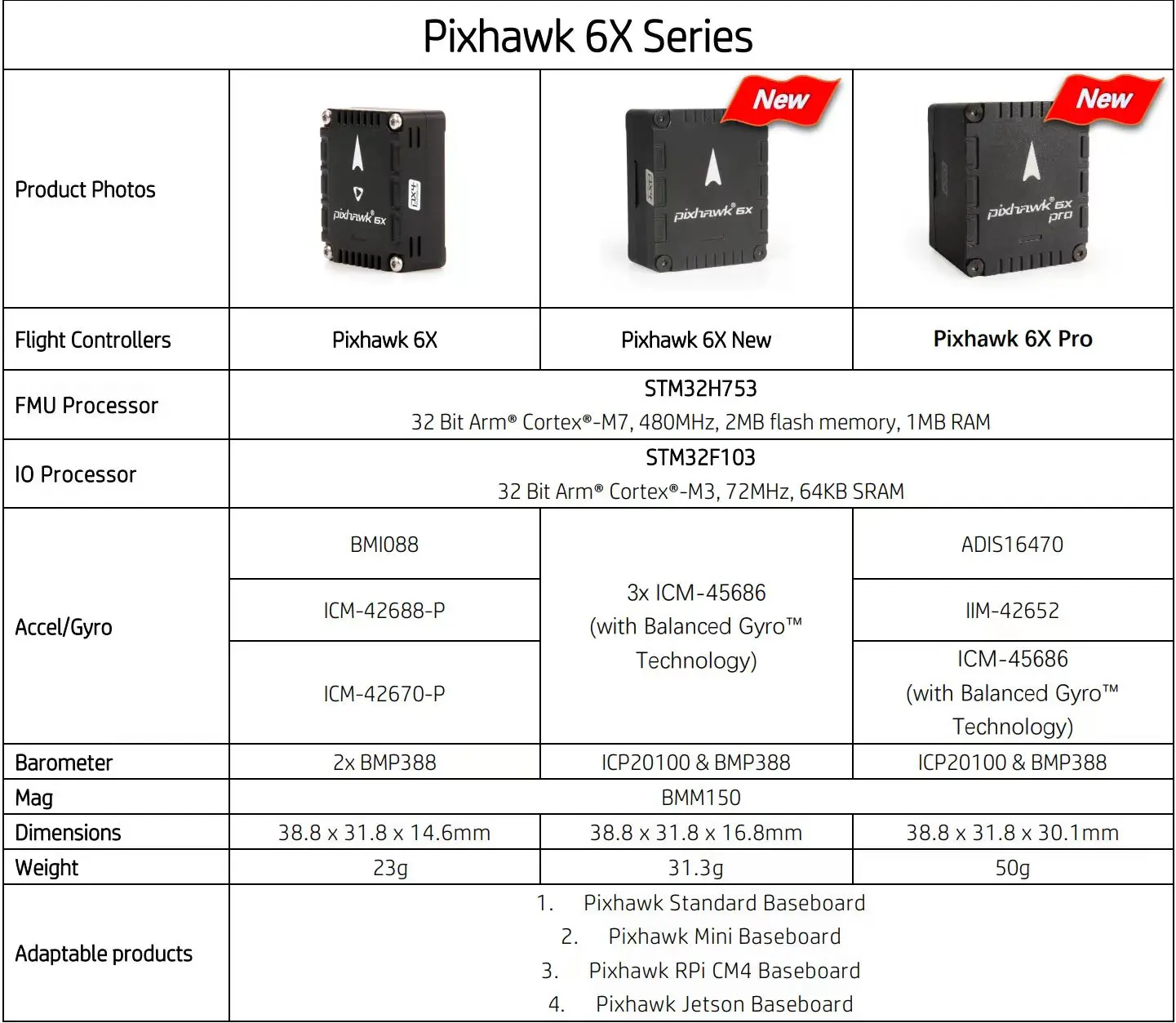
FMU Processor: STM32H753
32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM
-
IO Processor: STM32F103
32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
-
On-board sensors
Accel/Gyro: ICM-45686 with BalancedGyro™ Technology x3
Barometer: ICP20100
Barometer: BMP388
Mag: BMM150
Electrical data
-
Voltage Ratings:
Max input voltage: 6V
USB Power Input: 4.75~5.25V
Servo Rail Input: 0~36V
-
Current Ratings:
Telem1 output current limiter: 1.5A
All other port combined output current limiter: 1.5A
Mechanical data
-
Dimensions
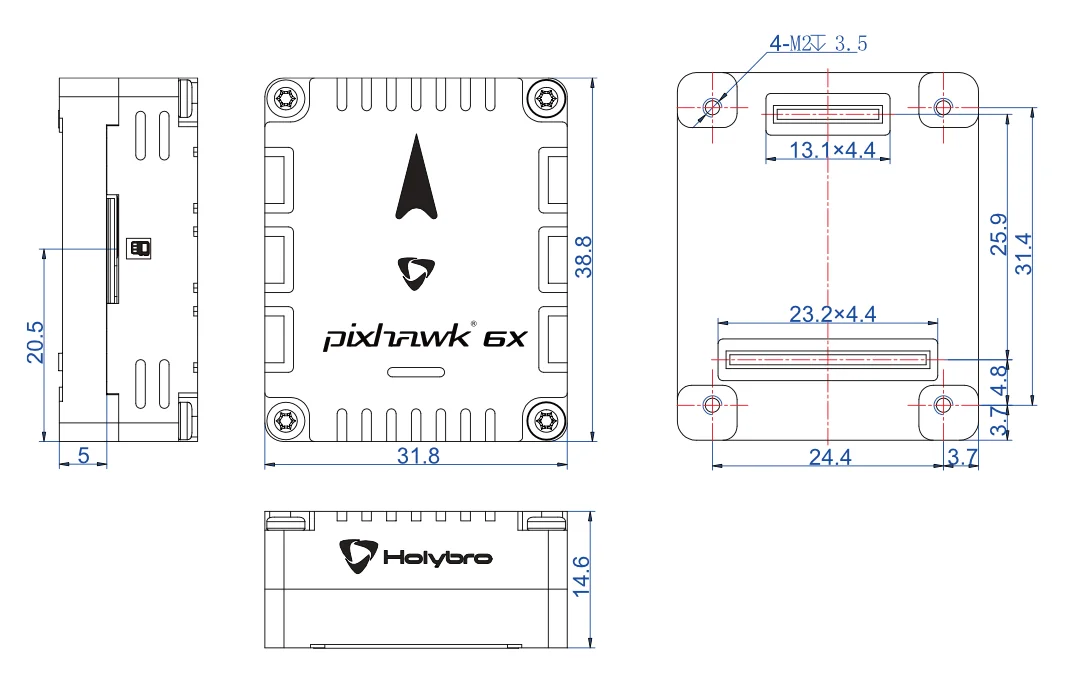
Flight Controller Module: 38.8 x 31.8 x 16.8mm
Standard Baseboard: 52.4 x 102 x 16.7mm (Aluminum)
Mini Baseboard: 43.4 x 72.8 x 14.2 mm
-
Weight
Flight Controller Module: 31.3g
Standard Baseboard: 72.5g (Aluminum)
Mini Baseboard: 26.5g
Pixhawk6X PRO飞控概述及配置参数
Key Design Point
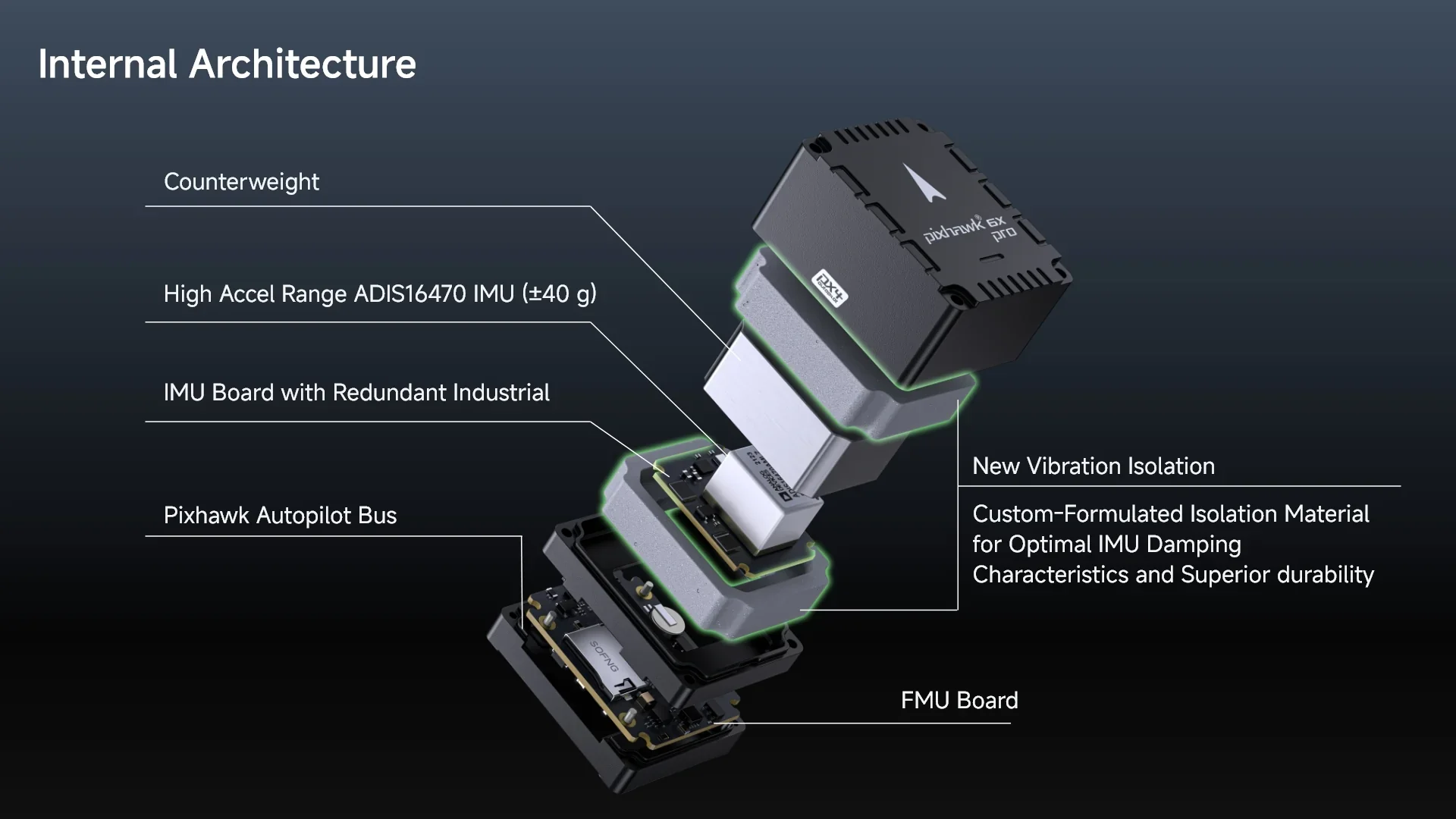
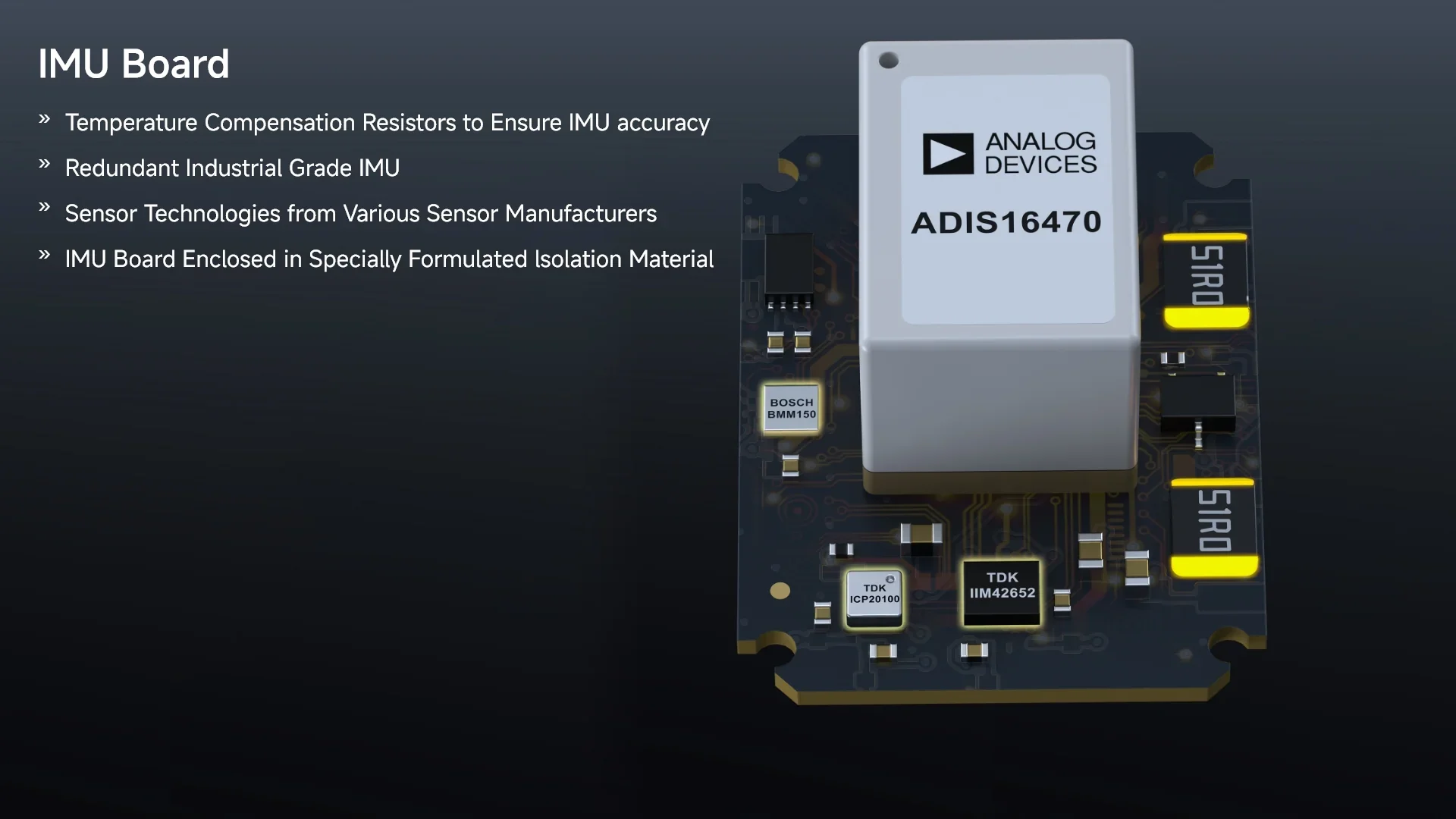
High-performance ADIS16470 Industrial IMU with high accelerometer dynamic range (±40 g), perfect foraccurate motion sensing in demanding UAV applications
All New advanced durable vibration isolation material with resonance frequency in the higher spectrum, ideal for industrial and commercial drone applications
Triple redundant IMU & double redundant barometer on separate buses
High performance STM32H753 Processor
Modular flight controller: separated IMU, FMU, and Base system
Safety-driven design incorporates sensors from different manufacturers and model lineups
Independent LDO powers every sensor set with independent power control.
Ethernet interface for high-speed mission computer integration
Temperature-controlled IMU board, allowing optimum working temperature of IMUs
All new Vibration Isolation Design
This new vibration isolation design uses a custom-formulated durabile silicone-based isolation material in place of the traditional foam design. Backed byextensive R&D and testing, it offers optimal IMU damping characteristics with resonance frequency in the higher spectrum, perfect for industrial and commercial drone
 Note:
Note:
FC Module + a baseboard is required for this product to function. A FC Module or a Baseboard by itself will not function.
Specification
Processors & Sensors
-
FMU Processor: STM32H753
32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM
-
IO Processor: STM32F103
32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
-
On-board sensors
-
Accel/Gyro: ADIS16470
±40g,Vibration Isolated, Industrial IMU
-
Accel/Gyro: IIM-42652
±16g,Vibration Isolated, Industrial IMU
-
Accel/Gyro: ICM-45686 with BalancedGyro™ Technology
±32g, Hard Mounted
Barometer: ICP20100
Barometer: BMP388
Mag: BMM150
-
Electrical data
-
Voltage Ratings:
Max input voltage: 6V
USB Power Input: 4.75~5.25V
Servo Rail Input: 0~36V
-
Current Ratings:
Telem1 output current limiter: 1.5A
All other port combined output current limiter: 1.5A
Mechanical data
-
Dimensions
Flight Controller Module: 38.8 x 31.8 x 14.6mm
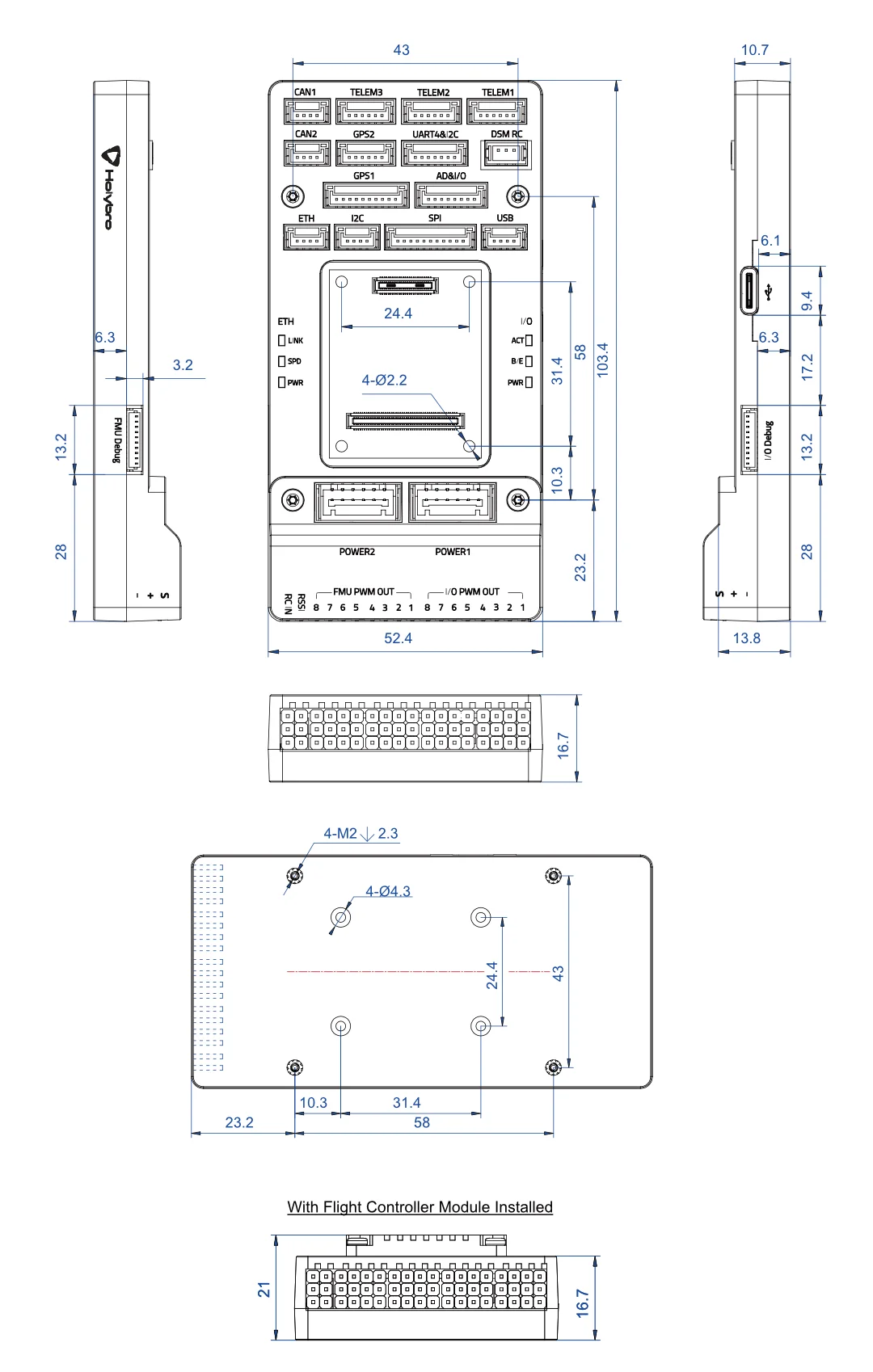
Standard Baseboard: 52.4 x 103.4 x 16.7mm
Mini Baseboard: 43.4 x 72.8 x 14.2 mm
-
Weight
Flight Controller Module: 23g
Standard Baseboard: 51g
Mini Baseboard: 26.5g